
As galerias encontradas debaixo da Rua da Prata, no centro de Lisboa, são estimadas de ter sido construídas no século 1 AC, durante o auge do Império Romano. Os romanos tinham ocupado a costa ocidental da Península Ibérica desde o século 2 AC, conquistando Olissipo (Lisboa) durante as campanhas da Primeira Guerra Púnica. Antes da conquista dos romanos, o porto no estuário do Tejo era já um importante porto comercial onde os Cartagineses realizavam trocas comerciais com a população local de origens célticas, comercializando metais e produtos agrícolas para os produtos manufaturados. Os romanos começaram a fortificação do oppidum em Olissipo no final do século 2 AC. Entre 40 e 30 AC Olissipo foi concedido o estatuto de Municipium civium Romanorum que conferiu a cidadania romana a todos os homens livres nascidos. Um tempo de paz e prosperidade significativa durou até o século 3 DC. Durante o início do Império Romano, os municípios afirmaram-se, erigindo estruturas para funções públicas (fóruns, teatros, mercados e templos): em Olissipo, vestígios destes edifícios ainda podem ser encontrados hoje. Um exemplo são as ruínas do Teatro Romano localizados na mesma colina como o castelo que tem vista para a Lisboa de hoje. Naqueles dias, a maioria da vida pública ocorria junto ao rio. De acordo com especialistas, as galerias debaixo da Rua da Prata foram construídas para estabilizar estruturalmente o solo perto das margens do rio, que normalmente é muito húmido, devido ao fluxo de água subterrânea para rio das colinas circundantes.
A construção subterrânea do criptopórtico foi necessário para fornecer uma base sólida para a construção de edifícios importantes neste local. Os recursos consideráveis necessários para construir este criptopórtico subterrâneo sugerem que os edifícios que suporta, são de grande importância, tais como o fórum de Lisboa ou edifícios dedicados a atividades comerciais e portuárias. As galerias consistem em corredores paralelos 3 m de altura por 2 a 3 m de largura. Os corredores têm paredes verticais e tetos circulares. Os principais corredores são intersetados perpendicularmente por corredores estreitos. Algumas galerias têm uma altura máxima entre 1,2 e 1,5 m. Algumas galerias proporcionam o acesso a pequenas e estreitas câmaras, que poderiam ter sido usados como áreas de armazenamento. A designação “cryptoporticus” refere-se à natureza escondida desta construção que foi utilizada como base para as construções de terra.
Ao longo dos séculos, as estruturas romanas na superfície desmoronaram ou foram substituídos por novos edifícios. No entanto, os edifícios mais recentes foram continuamente construídos sobre as fundações romanas pré-existentes. Os habitantes locais aproveitaram-se das águas subterrâneas coletadas nas galerias, fazendo furos acima das galerias (veja chaminé no lado direito da imagem acima). Um desses poços veio a ser conhecido como o “Poço das Águas Santas“, localizado na esquina da Rua da Prata e Rua de São Julião. A área que abrange as galerias (hoje baixa de Lisboa) foi completamente destruída no terremoto de 1755. Marquês de Pombal (primeiro-ministro) e Manual da Maia (arquiteto) foram responsáveis pela reconstrução de toda a cidade, criando na baixa de Lisboa, o bairro tipo grelha, conhecido hoje como a “Baixa Pombalina”. As galerias romanas foram redescobertas durante a reconstrução da área da baixa da cidade. Embora a maioria dos edifícios na “Baixa Pombalina” (baixa) são suportadas por estacas de pinho submersos no solo macio e molhado para dar estabilidade estrutural, os edifícios construídos em cima das galerias são suportados pelo criptopórtico romano pré-existente, que sobreviveu ao terramoto incólume. Uma pedra inscrita foi encontrado durante o início das investigações arqueológicas das galerias dedicadas a Esculápio, o deus romano da cura. A pedra de inscrita e as águas cristalinas encontrados no local, levou à hipótese de que as galerias podem ter sido usadas como um spa de água quente. Hoje, essa hipótese parece completamente infundada. Em meados do século 19, um projeto de caleira e esgoto foi iniciado para recolher toda a água que atravessa a “Baixa Pombalina”. Em 1859, um levantamento topográfico das galerias romanas foi concluída como parte deste projeto. Infelizmente, as caleiras intersectam as galerias ao longo das estradas Rua da Prata e Rua da Conceição, fazendo com que grande parte das galerias inacessíveis, visto que a localização dos acessos de entrada de a superfície ter sido perdida, com a exceção de dois ponto de entrada.
.")



As galerias continuam a acumular águas subterrâneas devido a uma longa racha ao longo do chão da galeria designado como “A Galeria das Nascentes“. Como resultado, o cryptoporticus é sempre parcialmente submersa. Vários anos atrás, o Museu da Cidade, museu responsável pelo monumento sob a direção da Câmara Municipal de Lisboa, decidiu permitir visitas ao monumento, mas apenas por alguns dias no ano. O acesso do público só é possível após bombear toda a água acumulada ao longo de todo o ano e a instalação das luzes. Bhttp://www.cm-lisboa.pt/ombas de água continuam o trabalho até que o monumento esteja novamente fechado ao público devido à significativa taxa de infiltração de água. O acesso do público é concedido por apenas 2 a 3 dias por ano, atraindo grandes multidões que esperam pacientemente na fila por mais de uma hora para visitar as galerias. O acesso às galerias encontra-se em uma localização muito precária, no meio da estrada (Rua da Conceição) ao lado dos carris do elétrico como é mostrado na imagem ao lado. Visto que os carris do elétrico não pode alterar o seu trajeto, os visitantes devem entrar e sair das galerias com extrema cautela.
Albatroz Engenharia propôs reconstruir um modelo 3D das Galerias Romanas para “Museu da Cidade”. Desta forma, não só os arqueólogos possuem um modelo exato das galerias, mas as pessoas seriam capazes de explorar as galerias, que são difíceis de visitar in situ, em um ambiente virtual.
A reconstrução envolveu o uso de um scanner a laser que mede as distâncias para os objetos na periferia do laser.
A aquisição de dados necessitou a instalação de uma estrutura de apoio para que o laser pudesse atravessar toda a extensão das galerias. Uma vez que o equipamento utilizado foi projetado para operar em ambientes hostis e é seguro para a vista, o transporte de equipamentos, a instalação e aquisição de dados foram concluídas, enquanto as galerias estavam sendo preparados para o acesso do público.
A área acessível para as galerias romanas é composta por seis galerias de diferentes comprimentos entre 12 m e 24 m e várias câmaras menores.

Um scanner a laser é um sensor de varredura composto por três partes:
Uma fonte de luz visível ou invisível. O emissor cria um raio de luz concentrado.
Componente que deteta parte do raio de luz que é refletida depois de entrar em contato com um alvo. A quantidade de luz refletida é dependente da cor e da natureza do alvo.
O sistema mecânico que gira o raio de luz ao longo de um arco de um círculo com um sofisticado sistema de espelhos.
A reconstrução virtual proposta pela Albatroz Engenharia baseia-se num modelo tridimensional criado a partir de nuvens de coordenadas individuais (xi, yi, zi). Estes tipos de modelos podem ser observados, rodados, navegados e manipulados em três dimensões.
Superfícies poligonais podem ser usados para unir as coordenadas tridimensionais gerando assim pisos sólidos, paredes e tetos.
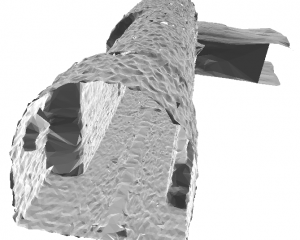
À direita há uma foto, tirada in situ, de uma secção da entrada da galeria, a nuvem de pontos correspondente a essa secção da entrada da galeria e, finalmente, uma imagem das superfícies geradas a partir da nuvem de pontos. De interesse é a área cheia de água no chão e as duas lajes apoiadas na parede galeria à direita.
O número de pontos necessários para construir o modelo de superfície pode ser significativamente reduzido, especialmente nos casos em que as superfícies são muito regular e quase planas. Assim, a representação das galerias pode ser simplificada utilizando superfícies maiores que aliviam a carga computacional gráfica sem sacrificar a geometria geral do modelo. Como exemplo, comparar o modelo da entrada de galeria utilizando 155.662 pontos com o modelo de superfície utilizando apenas 8474 pontos (ou, aproximadamente, 5%).


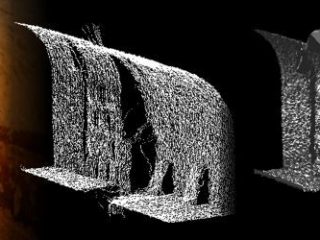
A construção do modelo 3D é baseado em subsequentes varrimentos de laser 2D ao longo de cada uma das galerias. A animação na figura à direita ilustra o processo. Do lado esquerdo, mostra o laser quando ele atravessa as galerias e à direita, os dados brutos de laser.
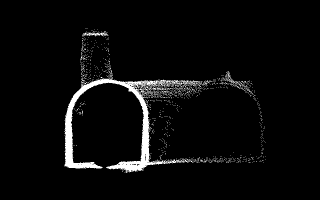
Para criar o modelo 3D, ou o laser é movido dentro de um ambiente específico (tal como uma galeria), ou o cenário é movido enquanto o laser é mantida numa posição fixa.1 Visto que, os locais arqueológicos têm dimensões de várias ordens de magnitude maior do que o laser, é muito mais fácil mover o laser através do local. Uma das maneiras mais fáceis e de baixo custo para atravessar o sensor laser através do local é usar uma plataforma móvel autónoma ou semi-autónoma. A chave para um modelo bem sucedido é registar e sincronizar a posição do sensor ao longo do tempo na estrutura de referência do plano de varrimento. A imagem à direita ilustra como um sensor de laser recolhe os dados como ele se move ao longo da mesma secção da galeria. O laser executa um varrimento de 360º, representado a vermelho, a quando da passagem pela galeria ao longo do seu eixo maior. Com cada varrimento, nas medidas de laser entre 500 e 1500, cada ponto é representado pela distância do laser para o obstáculo mais próximo, em todas as direção. O laser foi localizado aproximadamente no centro da galeria, cerca de 0,7 m acima do solo. Para efeito de comparação, a principal galeria (entrada na galeria) é de cerca de 2,3 m de altura, enquanto a galeria perpendicular à esquerda é de aproximadamente 1,4 m de altura. O laser mede o espaço volumétrico livre circundante enquanto o usuário “vê” as superfícies que limita este espaço livre. A análise da animação revela que o espaço livre na galeria aumenta à medida que o sensor se aproxima de uma galeria de intersecção ou uma “chaminé” que é realmente um velho poço bem dentro de um edifício na Rua da Conceição. Além disso, luminárias foram detetadas no lado direito da galeria pela mudança abrupta na curvatura suave do teto. Um dos inconvenientes de recolha de dados desta maneira é a oclusão de todas as superfícies que estão por trás de outros objetos presentes no local. Este fenómeno pode ser observado nas sombras presentes na figura à direita.
A estrutura experimental utilizado para a aquisição de dados está ilustrada na figura à direita. Um pequeno carrinho que transporta sensores, baterias, e um computador, desliza ao longo de um mono-carril retangular de alumínio. O computador regista e fornece feedback de aquisição de dados e imagem em tempo real.
Os dados são adquiridos, gravados e visualizados em tempo real. A GUI permite a visualização de uma reconstrução parcial 3D de várias galerias diferentes, conforme ilustrado na figura do lado direito.
1 Existem aplicações de reconstrução de laser, onde o laser permanece fixo e é o alvo que se move. Por exemplo, girando uma pequena estátua no campo de visão do laser.



Uma vez que os varrimentos 2D de todo o local tenham sido adquiridos, tal como ilustrado nas figuras anteriores, os dados devem ser organizados de modo a que o modelo 3D possa ser gerado. A organização dos dados requer medições da mudança de posição do sensor laser à medida que atravessa o local. Esses dados são adquiridos por meio de sensores auxiliares. Para minimizar os erros de medição, o laser deve ser movimentado ao longo de caminhos retilíneos. Se necessário, como no caso de galerias romanas, a reconstrução requereu sobrepor vários caminhos perpendiculares retilíneos. Outros caminhos podem ser mais adequadas para o site que está sendo reconstruida. No entanto, os erros de posição associados, terá uma tendência para aumentar.
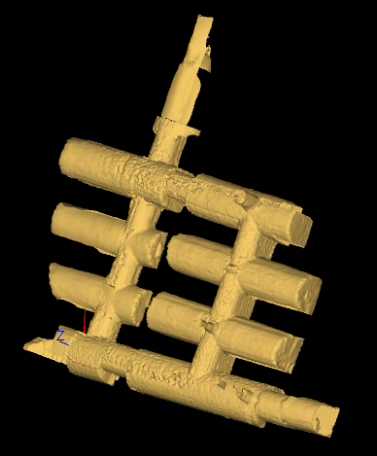
O modelo 3D de uma secção da entrada da galeria é mostrada na figura à direita.
Nota:
Este modelo 3D pode ser representado e explorado em 3D usando ferramentas de software apropriadas. Uma forma de visualizar o espaço é através de VRML – Virtual Reality Modeling Language. Um exemplo é apresentado em baixo.
O modelo que se segue foi construído a partir dos dados recolhidos após o número de pontos ter sido reduzido e as superfícies geradas que ligaram os vértices adjacentes.
Este modelo de superfície, ilustra claramente as diferenças entre a realidade projetada e a realidade reconstruida. Enquanto os modelos projetados são formadas por superfícies regulares com bordas retangulares e superfícies planas, o modelo reconstruido incorpora todas as pequenas irregularidades da superfície da galeria (também devido, em uma parte muito pequena, a erros de medição), fornecendo um modelo mais preciso do local.
Os dados apresentados no VRML pode ser importado para o software de design de computador (CAD) para a manipulação, análise e otimização por arquitetos, engenheiros civis e arqueólogos. Com software especializado, modelos arquitetónicos precisos podem ser criados combinando edifícios já existentes com virtual, para-serem-construídos, elementos ou mesmo estruturas que existiam no passado e há muito tinham desaparecido.



Imagens
Por defeito, todas as imagens são propriedade da Albatroz Engenharia exceto logos que pertencem às respetivas marcas e instituições. Albatroz Engenharia gostaria de agradecer a todos aqueles que fizeram suas fotos e imagens disponíveis para Albatroz Engenharia. Estes são identificados ao longo do texto.
Modelos VRML
Se está procurando um cliente VRML, a fim de visualizar modelos VRML 3D tentar VRML Cortona.



